Im Takt bleiben – Datenerfassung und -übertragung bei der R-Serie V SSI (Teil 2)
Was ist der synchrone Modus 2 bei der R-Serie V SSI?
Wie beim synchronen Modus 1 passt der Sensor die Durchführung der Messung sowie die Übertragung des Positionswerts auch beim synchronen Modus 2 an den Abfragetakt der Steuerung an. Allerdings wird beim synchronen Modus 2 eine neue Messung gestartet, wenn der zuletzt gemessene Positionswert von der Steuerung abgefragt wird. Da die Messung mit dem Abfragetakt der Steuerung gestartet wird, spricht man in diesem Fall auch vom „synchronen Start“. Der Vorteil des synchronen Starts ist, dass der Anwender genau weiß, wie „alt“ die Messung ist, also wann die Messung gestartet wurde – nämlich beim letzten Abfragetakt (Abb. 1). Während der Durchführung der Messung wird der Messwert nicht mehr aktualisiert. Wie bei jeder synchronen Messung ist die Totzeit auch bei dem synchronen Modus 2 konstant.
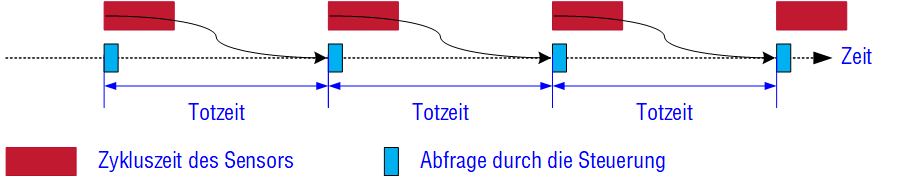
Abb. 1: Schematische Darstellung des synchronen Modus 2 bei der R-Serie V SSI.
der Abfragetakt der Steuerung kürzer ist als Zeit, die der Sensor zur Durchführung einer Messung benötigt?
Synchroner Modus 2 mit Extrapolation
Der synchrone Modus 2 umfasst neben dem synchronen Start auch eine lineare Extrapolation. Dabei wird während der Positionsmessung anhand der vorangegangenen Daten eine lineare Abschätzung über die Bewegung des Positionsmagneten durchgeführt. Da der Sensor den Abfragetakt der Steuerung kennt und weiß, wann der nächste Positionswert abgefragt wird, extrapoliert der Sensor die Position des Magneten für den Zeitpunkt der nächsten Abfrage und stellt den Wert bereit. In Abb. 2 sind gegenüber Abb. 1 die Zykluszeit des Sensors verdoppelt und der Abfragetakt der Steuerung verkürzt. Nach der Aufsynchronisierung liefert der Sensor aufgrund der Extrapolation zu jedem Abfragetakt einen neuen Messwert, auch wenn die Zykluszeit des Sensors länger als der Abfragetakt ist. Mit jedem ermittelten Messwert erfolgt eine Überprüfung und ggf. Korrektur der linearen Extrapolation.
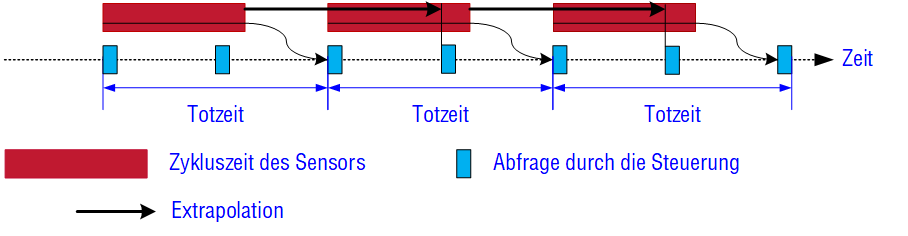
In diesem Beispiel ermöglicht die Extrapolation, dass der Sensor unabhängig von seiner Messlänge bei jedem Abfragetakt einen neuen Messwert liefert. Dies ist bis zu einer Abfragefrequenz von 10 kHz möglich. Ohne Extrapolation würde der zuletzt gemessene Messwert wiederholt ausgegeben, bis ein neuer Messwert ermittelt ist.
Der synchrone Modus 2 ist eine Kombination aus synchroner Messung mit synchronem Start und Extrapolation. Die Extrapolation wird bei dem synchronen Modus 2 selbständig vom Sensor aktiviert, wenn der Abfragetakt der Steuerung kürzer ist als der Messzyklus des Sensors.
Was ist der synchrone Modus 3 bei der R-Serie V SSI?
Der synchrone Modus 3 ist wie der synchrone Modus 2 eine Kombination aus synchroner Messung mit synchronem Start und Extrapolation. Das bedeutet, dass die Messung mit dem Abfragetakt der Steuerung gestartet wird. Ebenso aktiviert der Sensor die Extrapolation, wenn der Abfragetakt der Steuerung kürzer ist als der Messzyklus des Sensors. Die weitere Eigenschaft des synchronen Modus 3 ist die Minimierung des Schleppfehlers.
Wie zuvor beschrieben, wird der Messwert während der Durchführung einer Messung nicht mehr aktualisiert. Häufig steht der Positionsmagnet jedoch nicht still, sondern bewegt sich während der Durchführung der Positionsmessung weiter. Dieses Weiterbewegen des Magneten wird vom Sensor nicht berücksichtigt, weil der Sensor mit der Messung beschäftigt ist. Die Zeit, die der Sensor zur Durchführung der Messung und Bereitstellung des Messwerts benötigt, „hinkt“ der Sensor dem realen Positionswert hinterher. Dieses Hinterherhinken wird als Schleppfehler bezeichnet. Dieser Schleppfehler wird beim synchronen Modus 3 minimiert.
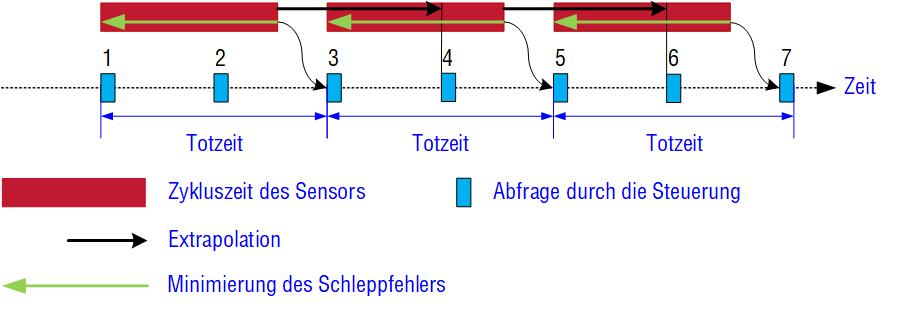
In Abb. 3 beträgt die Zykluszeit des Sensors 1,5 Einheiten des Abfragetakts. Da der Abfragetakt der Steuerung kleiner als die Zykluszeit des Sensors ist, ist die Extrapolation aktiviert. Bewegt sich der Positionsmagnet auf dem Sensor mit konstanter Geschwindigkeit, ist der Schleppfehler konstant: In diesem Beispiel beträgt dieses Hinterherhinken 1,5 Einheiten des Abfragetakts. Da der Sensor weiß, um wie viele Einheiten er hinterherhinkt, berücksichtigt er dies bei der Ausgabe des Positionswerts. In diesem Beispiel gilt:
- Für den Zeitpunkt 3: Ausgegebener Wert = Messwert zum Zeitpunkt 1 + Schleppfehler 1,5 Einheiten
- Für den Zeitpunkt 4: Ausgegebener Wert = Messwert zum Zeitpunkt 1 + Schleppfehler 1,5 Einheiten + Extrapolation
- Für den Zeitpunkt 5: Ausgegebener Wert = Messwert zum Zeitpunkt 3 + Schleppfehler 1,5 Einheiten
- Für den Zeitpunkt 6: Ausgegebener Wert = Messwert zum Zeitpunkt 3 + Schleppfehler 1,5 Einheiten + Extrapolation
- Für den Zeitpunkt 7: Ausgegebener Wert = Messwert zum Zeitpunkt 5 + Schleppfehler 1,5 Einheiten
Bei einem synchronen Start wie beim synchronen Modus 2 weiß der Anwender zwar, wie „alt“ der Messwert ist, jedoch ist dieser Messwert bei der Ausgabe schon „veraltet“. Dies wird beim synchronen Modus 3 durch die Minimierung des Schleppfehlers berücksichtigt. Somit wird zum Abfragezeitpunkt ein Messwert vom Sensor ausgegeben, welcher der realen Position des Magneten zum Zeitpunkt der Abfrage sehr, sehr nah ist.
Was bedeutet das für die Anwendung?
Die verschiedenen Modi zur Datenerfassung und -übertragung bei der R-Serie V SSI ermöglichen dem Anwender, das Zeitverhalten des Sensors bei der Messung entsprechend seiner Anwendung auszuwählen. Der Modus kann dabei vor Ort über den TempoLink Sensorassistenten geändert werden. Eine Messung, die synchron zum Takt der Steuerung stattfindet, ist eine wesentliche Voraussetzung für Anwendungen, bei denen mehrere Achsen gleichzeitig bewegt werden. Der synchrone Start bietet den Vorteil, dass der Anwender genau weiß, zu welchem Zeitpunkt der Messwert ermittelt wurde. Zudem ermöglicht die Extrapolation die Bereitstellung eines neuen Messwerts, auch wenn der Sensor in einem kürzeren Takt als seinem Messzyklus von der Steuerung abgefragt wird. Die R-Serie V SSI ermöglicht es somit, immer im richtigen Takt zu bleiben.
KONTAKTIEREN SIE UNS
Sie haben eine Frage zu einem unserer Produkte oder möchten mehr Details über eine mögliche Anwendung erfahren?
Klicken Sie hier, um unser Anfrageformular auszufüllen
Sie möchten die neuesten Blog-Updates und andere Neuigkeiten nicht verpassen?
Klicken Sie hier, um unseren Newsletter zu abonnieren
Maximale Kundenzufriedenheit